Subject_05_Final Mov
The final prototype's name is "SEAT". It means making seat and this chair will make the act to sit in this seat (sit;seat). Anyway this is the final movie working model and final exhibition in degree show. And thanks to my professor David hall for many and great advices.
"SEAT"
Monday, December 8, 2014
Saturday, November 15, 2014
Exp_05_13
Subject_05_Assembling
The first step for assembling is bonding vertical structure to sustain weight. The vertical structure is made with bonded each other three plates. The middle plate has structure like a bone, so 12 vertical plates can sustain very heavy weight.
 Mid structure
Mid structure
 Bonding
Bonding

The fixing parts to assemble skin and gear parts need tapping process because these parts need strong union. These parts are combined by bolts directly. And at first, the top floor is assembled.




 Installed arduino board
Installed arduino board

 Rack gear test
Rack gear test
The circuit board will be placed on bottom plate, so the model is turned over for completely assemble. The bottom plate and circuit board are hang on the celling with fishing wire and whole wiring proceeds.



After wiring and assembling body structure, silicon skins are installed. Whole silicon skins are divided into four parts and each parts are connected through prepared point to have same height from body parts. And silicon is installed on body part by tapped acrylic parts and bolt.

Tapped parts and bolt




 Test_02
Test_02
 Test_03
Test_03
The first step for assembling is bonding vertical structure to sustain weight. The vertical structure is made with bonded each other three plates. The middle plate has structure like a bone, so 12 vertical plates can sustain very heavy weight.
Installing servo
The fixing parts to assemble skin and gear parts need tapping process because these parts need strong union. These parts are combined by bolts directly. And at first, the top floor is assembled.
Fixing parts for skin
Gear
Installed gear
Rack gear
Assembled top floor
The circuit board will be placed on bottom plate, so the model is turned over for completely assemble. The bottom plate and circuit board are hang on the celling with fishing wire and whole wiring proceeds.
Turning over
Hanged botom plate
Wiring circuit
After wiring and assembling body structure, silicon skins are installed. Whole silicon skins are divided into four parts and each parts are connected through prepared point to have same height from body parts. And silicon is installed on body part by tapped acrylic parts and bolt.
Tapped parts and bolt
Installing skin
Installed skin
Completed model
Test_01
Exp_05_12
Subject_05_Preparing Whole parts
For the final model, whole parts are prepared by laser cut method. And the mould is made by acrylic material also. Actually the silicon material skin will be made by hand casting without mould using viscosity controller. But if there is no mould, the surface of skin will be tough. So the method is changed for clear surface with completely quality.
 Laser cutting_01
Laser cutting_01
 Laser cutting_02
Laser cutting_02
 Whole parts
Whole parts







 Connecting part
Connecting part
The body parts need the process that whole parts are sanded surface for making glass material texture. Gears, rails, racks, structures and plates are all sanded at specialty shop.



For the final model, whole parts are prepared by laser cut method. And the mould is made by acrylic material also. Actually the silicon material skin will be made by hand casting without mould using viscosity controller. But if there is no mould, the surface of skin will be tough. So the method is changed for clear surface with completely quality.
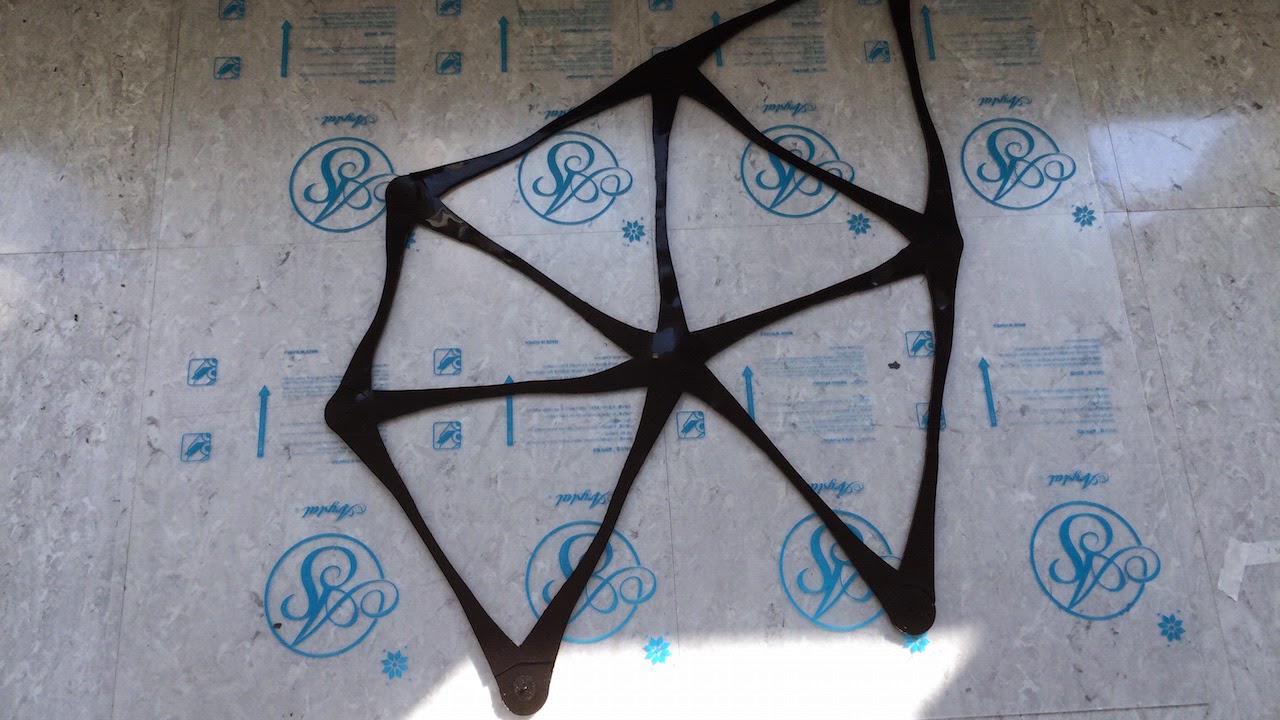
The skin schematic shape is made by 3d modeling and this model is transformed to planar figure by pepakula program. This planar figure is used for making skin silicon mould. Silicon skin will have 5mm thickness and 85% scale in comparison with original skin size for sustaining weight.
Planar figure
Mould
Acrylic bond
The silicon color will be black color. The black dye for silicon will be used and the color can express contrast and emphasis feeling for skin wire frame shape in comparison with white acrylic body.
Black color dye for silicon
Mix
Casting
Pull out & Clear edge
Completed skin
The body parts need the process that whole parts are sanded surface for making glass material texture. Gears, rails, racks, structures and plates are all sanded at specialty shop.
Whole body parts
Sanding
Completed sanding
Thursday, October 23, 2014
Exp_05_11
Subject_05_Module test for skin material_02 & Sensor test
The skin surface needs more elastic and stretchable material for natural movement. So, the silicon is used for test in this time experiment. The silicon is originally used for special cosmetic in movie field. For example, making skin or the flesh of body and so on. This silicon has 800% stretch possibility and is very durable. Let's test.
 Eco Flex 0010 from Smoth on company
Eco Flex 0010 from Smoth on company
 Mix
Mix
 Test
Test
 Stretching test
Stretching test
The test is very successful. The silicon is very soft and durable when it is fully casted. But, the silicon needs more thicker for making shape in model surface. So, the viscosity controller is needed. And module surface is tested with two shape type. The one has inside wire like an web, and the other is made by just wire frame. In addition this, the sensor is added for making interactive environment. The PIR sensor is installed to find human motion and TCRT5000 is installed to find sitting person on the top floor of chair.


 Web type
Web type
 Circuit for sensors
Circuit for sensors
 First test
First test
 Wire frame type
Wire frame type
 Cast without mould
Cast without mould
 Connection with module
Connection with module
 Second test
Second test
Movie
The skin surface needs more elastic and stretchable material for natural movement. So, the silicon is used for test in this time experiment. The silicon is originally used for special cosmetic in movie field. For example, making skin or the flesh of body and so on. This silicon has 800% stretch possibility and is very durable. Let's test.
The test is very successful. The silicon is very soft and durable when it is fully casted. But, the silicon needs more thicker for making shape in model surface. So, the viscosity controller is needed. And module surface is tested with two shape type. The one has inside wire like an web, and the other is made by just wire frame. In addition this, the sensor is added for making interactive environment. The PIR sensor is installed to find human motion and TCRT5000 is installed to find sitting person on the top floor of chair.
Thi-vex viscosity controller
Vinyl for mould
Movie
Sunday, October 19, 2014
Exp_05_10
Subject_05_Module test for skin material_01 & Tech test
The module making is needed for skin material choice. So, the part of first floor in whole model is chosen for module test. The part is triangle shape and it has three vertices with 3 servos with real scale. And whole parts are made by laser cutting method through cad drawing. Actuators are using 6 voltage and they have the 11kg/cm torque in 6 voltage.

 Assembling_01
Assembling_01
 Assembling_02
Assembling_02
 Gear and Servo
Gear and Servo
 Rack for linear movement
Rack for linear movement
 The top for sitting part
The top for sitting part
 Gear movement
Gear movement
The first material is elastic wire and fabric. The elastic wire is for fastening long hair and fabric is woman's black stockings. Actually, these materials are too tight to sustain the tension for servo. So, something new material is needed to perfectly work in final model. This is the first test mov.

 Black stocking
Black stocking
Material test_01
Before the final model making, the project needs confirmation to working multiple servo with one signal between vvvv and arduino. So, the technical test is processed at first. Two arduino boards are used, and 16 servos are used. Each 4 servos are connected with 6 voltage 2A AC/DC convertor, so 4 AC/DC convertors are used totally by external power source in this circuit. This is the test movie.





Tech test
The module making is needed for skin material choice. So, the part of first floor in whole model is chosen for module test. The part is triangle shape and it has three vertices with 3 servos with real scale. And whole parts are made by laser cutting method through cad drawing. Actuators are using 6 voltage and they have the 11kg/cm torque in 6 voltage.
Whole parts
The first material is elastic wire and fabric. The elastic wire is for fastening long hair and fabric is woman's black stockings. Actually, these materials are too tight to sustain the tension for servo. So, something new material is needed to perfectly work in final model. This is the first test mov.
Elastic wire
Material test_01
Before the final model making, the project needs confirmation to working multiple servo with one signal between vvvv and arduino. So, the technical test is processed at first. Two arduino boards are used, and 16 servos are used. Each 4 servos are connected with 6 voltage 2A AC/DC convertor, so 4 AC/DC convertors are used totally by external power source in this circuit. This is the test movie.
Two Boards
16 Servos
4 AC/DC Convertors
6V 2A Adaptor
Whole circuit
Tech test
Subscribe to:
Posts
(
Atom
)